
’22年7月に導入したDobot社製協働ロボット立ち上げ時に困ったこと、対策したことなどを自身のメモ書きとして、また今後導入する方が同じように困らないようにということで残しておきます。
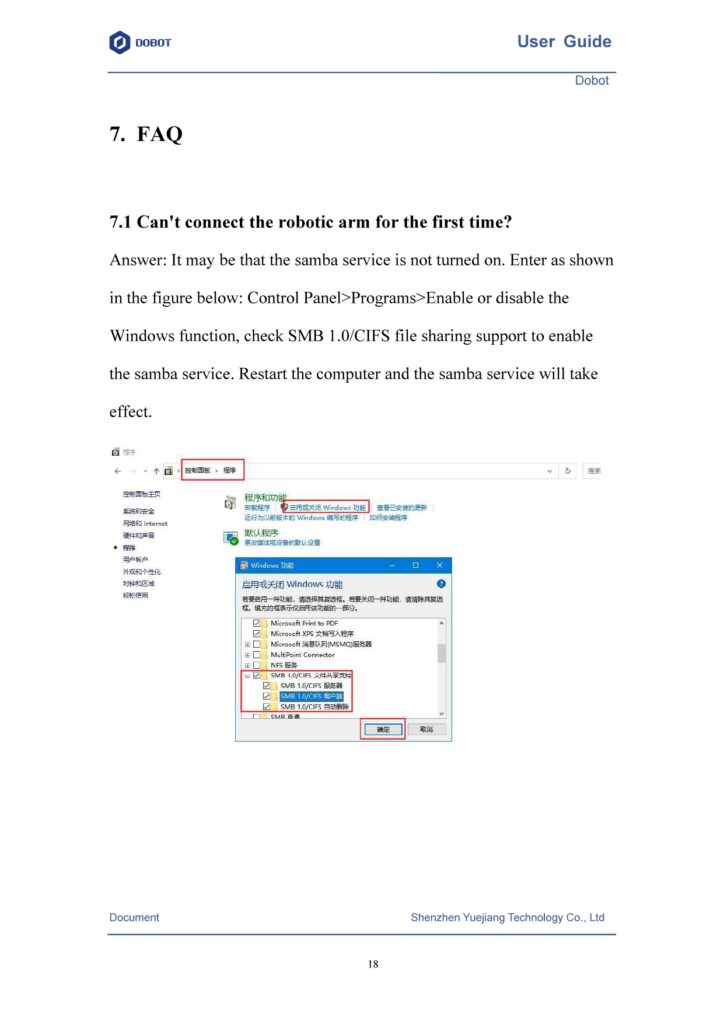
- DobotSCStudioとの通信設定において、接続が確立しなかった。
- Samba Service設定によるファイルの共用が必要。(DobotSCStuido立ち上げ時にリンクが出る英文の「StartUp Guide」p18以降に記述あり
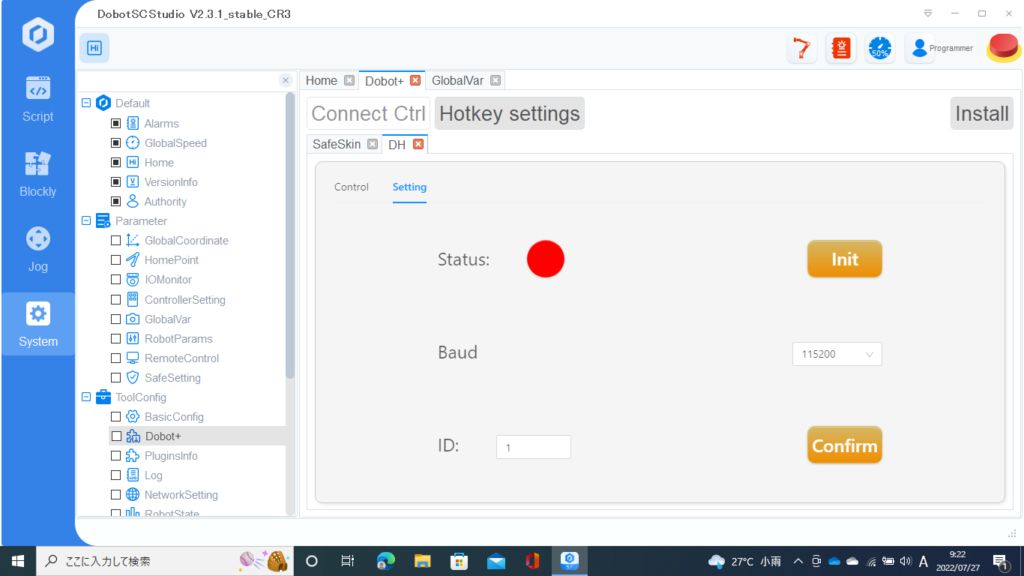
- DobotSCStudioにてDHハンドの原点座標がおかしくなる。
- ToolCofingのDobot+で実施した場合のみ問題あり。BloclyやScript内でInitした場合は正常に原点復帰される。
とりあえず動作プログラム内で原点復帰実施。
- ToolCofingのDobot+で実施した場合のみ問題あり。BloclyやScript内でInitした場合は正常に原点復帰される。
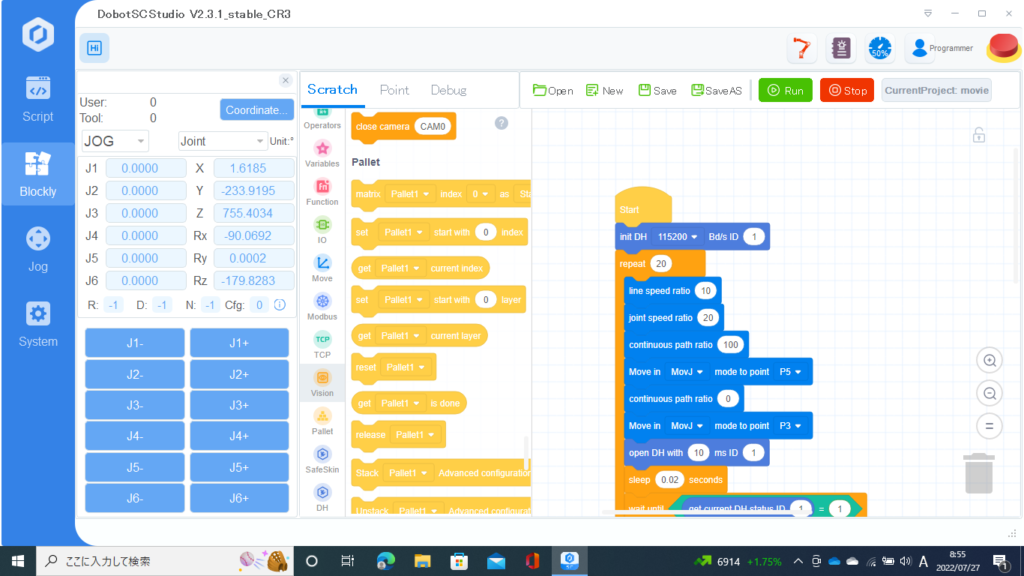
- DobotSCStudioのグローバル変数を動作プログラム内(Blockly、Script)で使用できない。
- Scriptでは使用可能。Bloclyでは変数が表示されない。
- Scriptで使用可能ではあるが、プログラムRun毎に初期値に戻される。
global_holdの有効・無効で差が見られない?
- ゲームパッドでのJog動作可能かどうか?
- DobotSCStudio立ち上げ状態での動作はできなかった。アプリ内のボタン情報(ハンドル)を自作プログラムから取得できなかった。
- DobotSCStudio経由ではなく、自作アプリケーションなら可能。
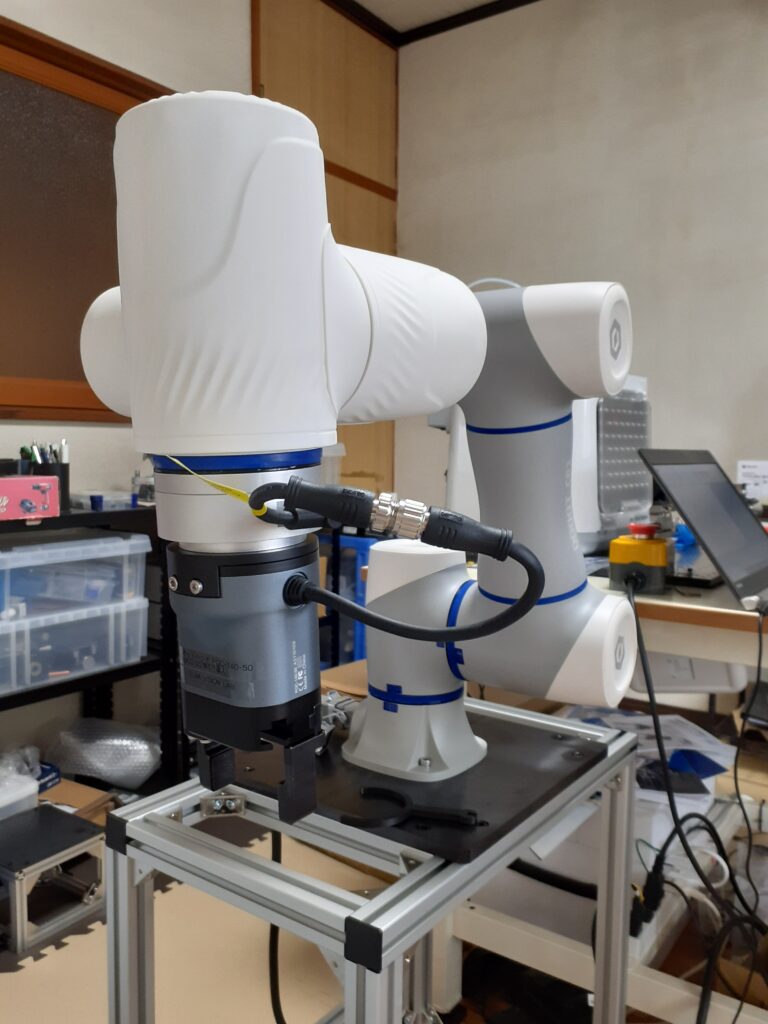
- DHハンドとロボット間のケーブル固定が難しい。
- コネクタ変換ケーブルの長さが中途半端で固定が難しい。
- ケーブルホルダーを3Dプリンターで自作
- コネクタ変換ケーブルの長さが中途半端で固定が難しい。

- SCStudioでの通信接続が確立しにくい場合がある。
- コントローラーとの共有フォルダが開けるか確認すると良い(Windows+Rで「\\192.168.5.1」と入力して開けるか)
- 電源入れ忘れも多い。
- 滑らかな輪郭制御ができない。1ポイントずつ減速する。
- StartPath(“isCart=1”)指令を使うとユーザー座標系での輪郭制御が可能
https://izumi-visionlab.com/front-page/knowledge/dobot-cr-%e8%bc%aa%e9%83%ad%e5%88%b6%e5%be%a1%e8%a8%ad%e5%ae%9a%e6%96%b9%e6%b3%95/
- StartPath(“isCart=1”)指令を使うとユーザー座標系での輪郭制御が可能
- コントローラーのProjectフォルダ内に保存されるファイルの時間がずれている。(中国時間?)
- Dobot Studio Proで変更可能。
- 「アラームログ」→「マシンの状態」→「コントローラー時間:修正」で
修正用のウィンドウが表示される。 - 時間は標準時間で登録する
- 位置決め停止後にエンドエフェクタが微妙に振動(ダイヤルゲージが70μm程度触れる)
- エンコーダの値は変化なし(DobotSCStudioで確認)
- 振動の方向は今後調査予定