
アプリケーションDHGripperUIにて設定する
協働ロボットで汎用のグリッパーを使用するときには、コスト的にDH-Roboticsを採用することもあります。
ロボットメーカーによってはDobotのようにツール用I/OポートからRS485で制御できる場合もありますが、I/Oのみの対応製品もあるので、I/Oからグリッパーを制御する必要があります。
今回はI/Oで動作させる場合のパラメータの設定方法を紹介します。
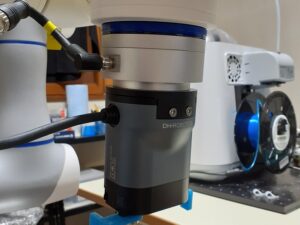
使用するグリッパーはPGC 140-50になります。
1.アプリケーションのインストーラーとマニュアルをダウンロードします
リンク先HPを開き、下の方にあるホストコンピュータデバッグソフトウェア – DH-ROBOTICSをクリックします。
しばらくするとダウンロードフォルダに圧縮ファイルが保存されるので、解凍し中にあるDHGripperUI-32bit-release-c-V3.3.0.exeというファイルをクリックしインストールを実施します。
インストールが完了しましたら、同じくデバッグソフトウェア 使用説明書をダウンロードします。

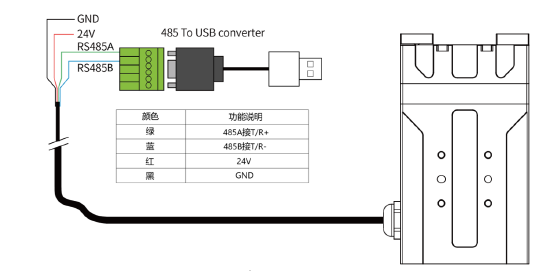
2.ロボットハンドとデータコンバータを接続します
ロボットハンドに同梱されていたRS485⇔USBコンバータを取り出します。
24V、GND、RS485A、RS485Bの配線について以下のように接続します。
3.アプリケーションを立ち上げ
上記にてインストールしたDHGripperUIをクリックして立ち上げます。
左上にあるAuto Connectというボタンをクリックします。
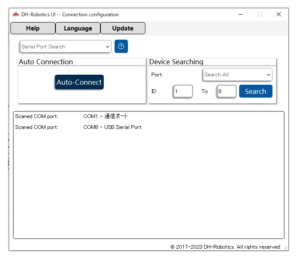
正常に接続できた場合は2つのウィンドウが立ち上がります。
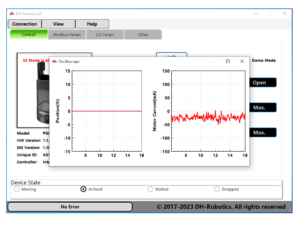
I/O Paramのタグを選択します。
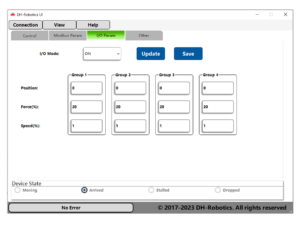
Updateのボタンを押すと、Group1~4のパラメータ値がグリッパー側のコントローラーから読み取られます。
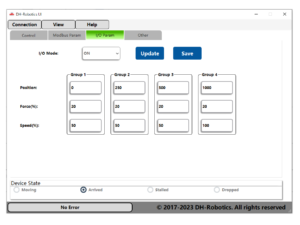
Group1~4はTool_I/OのDO1・DO2の状態と対応しています。
- Group1 … DO1 ON / DO2 ON
- Group2 … DO1 OFF / DO2 ON
- Group3 … DO1 ON / DO2 OFF
- Group4 … DO1 OFF / DO2 OFF
パラメータはPosition(0~1000),Force(20~100),Speed(1~100)の3つです。
直接テキストボックスの値を変更します。
その後Saveボタンを押すと、グリッパーのコントローラーに反映されます。
またI/O ModeはONにしておいてください。
以上で完了です。