ロボットコントローラーはサーバーとして通信可能(ポート 2000, 2001)
マニュアルにも記載がありますが、ロボットは電源が入るとサーバーとして外部デバイス(クライアント)との接続を待ちます。
IPアドレスはケーブルを接続したLANポートに対するシステム設定のNET項目の画面で確認します。
ポート2000は、外部からの要求信号を受け入れ、レスポンスを返します。
ポート2001は、クライアント側へ定周期(0.1s間隔)でロボットステータスを送信します。


ロボットステータスをポート2001からPythonコードで取得
1. RobotStatusクラスの定義
ロボットの各種情報を格納するRobotStatusクラスを作成。今回はrobot_status.pyファイルに記述しました。
# ロボットステータス情報を格納
class RobotStatus:
actual_joint_position: list[float] = [0] * 7
actual_joint_velocity: list[float] = [0] * 7
actual_joint_acceleration: list[float] = [0] * 7
actual_joint_torque: list[float] = [0] * 7
desired_joint_position: list[float] = [0] * 7
desired_joint_velocity: list[float] = [0] * 7
expected_joint_acceleration: list[float] = [0] * 7
joint_expected_torque: list[float] = [0] * 7
actual_joint_temperature: list[float] = [0] * 7
actual_joint_current: list[float] = [0] * 7
servo_driver_error: list[int] = [0] * 7
servo_driver_status: list[int] = [0] * 7
reserved1: bytes = [0] * 32
tcp_phisycal_position: list[float] = [0] * 6
tcp_actual_speed: list[float] = [0] * 6
tcp_actual_acceleration: list[float] = [0] * 6
actual_external_force: list[float] = [0] * 6
tcp_desired_position: list[float] = [0] * 6
tcp_expected_speed: list[float] = [0] * 6
tcp_expected_acceleration: list[float] = [0] * 6
theoretical_external_force: list[float] = [0] * 6
actual_external_force_on_base: list[float] = [0] * 6
theoretical_external_force_on_base: list[float] = [0] * 6
active_tool_coordinate_system: list[float] = [0] * 6
active_workpiece_coordinate_system: list[float] = [0] * 6
closing_velocity: float = [0] * 4
global_velocity: int = 0
jog_speed: int = 0
reserved2: bytes = [0] * 58
features_io_input: bytes = [0] * 8
function_io_output: bytes = [0] * 8
digital_io_input: bytes = [0] * 16
digital_io_output: bytes = [0] * 16
analog_input: list[float] = [0] * 8
analog_output: list[float] = [0] * 8
float_register_input: list[float] = [0] * 32
float_register_output: list[float] = [0] * 32
function_bool_register_input: bytes = [0] * 16
function_bool_register_output: bytes = [0] * 16
bool_register_input: bytes = [0] * 64
bool_register_output: bytes = [0] * 64
word_register_input: list[int] = [0] * 32
word_register_output: list[int] = [0] * 32
reserved: bytes = [0] * 31
real_machine_mode: int = 0
tool_io_input: bytes = [0] * 8
tool_io_output: bytes = [0] * 8
tool_analog_input: list[float] = [0] * 2
tool_analog_output: list[float] = [0] * 2
tool_button_status: bytes = [0] * 2
reserved4: bytes = [0] * 6
robot_operation_mode: int = 0
robot_state: int = 0
program_running_status: int = 0
safety_monitoring_status: int = 0
collision_detection_trigger: int = 0
collision_axis: int = 0
reserved5: bytes = [0] * 2
robot_error_code: bytes = [0] * 4
reserved6: bytes = [0] * 8
def __init__(self):
pass2. リモート制御用クラスとデータ割り当て用関数 _parse_data(data: bytes)関数の定義
各種モジュールのインポートと外部制御用のクラスDucoRemoteControlを定義。
また同クラスにソケット通信でロボットコントローラーから受信した1468バイトのデータをロボットステータスに割り当てる関数_parse_data(data: bytes)関数を定義。
import socket
import logging
import threading
import time
import struct
import msvcrt
from robot_status import RobotStatus
# リモート制御用クラス
class DucoRemoteControl:
_ip_adress: str = '192.168.1.10'
_port_status: int = 2001
_app_closing = False
_logger = None
logger_name: str = __name__
_robot_status = RobotStatus()
TCP_TIMEOUT = 0.5
# 受信したバイト列データをRobotStatusに割り当てる
def _parse_data(self, data: bytes):
if len(data) < 1468:
return None
index = 0
for i in range(7):
self._robot_status.actual_joint_position[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.actual_joint_velocity[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.actual_joint_acceleration[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.actual_joint_torque[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.desired_joint_position[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.desired_joint_velocity[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.expected_joint_acceleration[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.joint_expected_torque[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.actual_joint_temperature[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.actual_joint_current[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.servo_driver_error[i] = struct.unpack('<I', data[index: index + 4])[0]
index += 4
for i in range(7):
self._robot_status.servo_driver_status[i] = struct.unpack('<I', data[index: index + 4])[0]
index += 4
index = 368
for i in range(6):
self._robot_status.tcp_phisycal_position[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.tcp_actual_speed[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.tcp_actual_acceleration[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.actual_external_force[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.tcp_desired_position[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.tcp_expected_speed[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.tcp_expected_acceleration[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.theoretical_external_force[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.actual_external_force_on_base[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.theoretical_external_force_on_base[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.active_tool_coordinate_system[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(6):
self._robot_status.active_workpiece_coordinate_system[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(4):
self._robot_status.closing_velocity[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 1
self._robot_status.global_velocity = data[index]
index += 1
self._robot_status.jog_speed = data[index]
index += 1
index = 720
for i in range(8):
self._robot_status.features_io_input[i] = data[index]
index += 1
for i in range(8):
self._robot_status.function_io_output[i] = data[index]
index += 1
for i in range(16):
self._robot_status.digital_io_input[i] = data[index]
index += 1
for i in range(16):
self._robot_status.digital_io_output[i] = data[index]
index += 1
for i in range(8):
self._robot_status.analog_input[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(8):
self._robot_status.analog_output[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(32):
self._robot_status.float_register_input[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(32):
self._robot_status.float_register_output[i] = struct.unpack('<f', data[index: index + 4])[0]
index += 4
for i in range(16):
self._robot_status.function_bool_register_input[i] = data[index]
index += 1
for i in range(16):
self._robot_status.function_bool_register_output[i] = data[index]
index += 1
for i in range(64):
self._robot_status.bool_register_input[i] = data[index]
index += 1
for i in range(64):
self._robot_status.bool_register_output[i] = data[index]
index += 1
for i in range(32):
self._robot_status.word_register_input[i] = struct.unpack('<h', data[index: index + 2])[0]
index += 2
for i in range(32):
self._robot_status.word_register_output[i] = struct.unpack('<h', data[index: index + 2])[0]
index += 2
index = 1407
self._robot_status.real_machine_mode = data[index]
index += 1
self._robot_status.robot_state = data[index]
index += 1
self._robot_status.program_running_status = data[index]
index += 1
self._robot_status.safety_monitoring_status = data[index]
index += 1
self._robot_status.collision_detection_trigger = data[index]
index += 1
self._robot_status.collision_axis = data[index]
index += 1
index = 1456
for i in range(4):
self._robot_status.robot_error_code[i] = data[index]
index += 13. ソケット通信の開始と周期的にデータ受信を行う関数の定義
ソケット通信の開始と周期的にデータ受信を行う関数_received_robot_statusの定義を記述します。今回は本変数内のループ部にprint()関数にて取得したロボットのTCP座標を表示するようにしています。
import socket
import threading
import time
import struct
import msvcrt
from robot_status import RobotStatus
# リモート制御用クラス
class DucoRemoteControl:
# (中略)
# ソケット通信でロボットコントローラーからデータを受信する
def _received_robot_status(self):
try:
# ソケット接続の開始
s = socket.create_connection((self._ip_adress, self._port_status))
self._logger.info(f"DUCOロボットと接続しました ({self._ip_adress}: {self._port_status})")
except (ConnectionRefusedError, TimeoutError):
self._logger.warning(
f"DUCOロボットとの接続に失敗しました ({self._ip_adress}: {self._port_status})")
time.sleep(0.01)
return False
except AttributeError:
self._logger.warning(f"DUCOロボットとの接続に失敗しました ({self._ip_adress}: {self._port_status})")
return False
while not self._app_closing:
try:
rcv_data = s.recv(3000)[0:]
except TimeoutError:
time.sleep(0.05)
continue
except OSError:
time.sleep(0.05)
self._logger.warning("データ受信に失敗しました")
continue
self._parse_data(rcv_data)
# 今回はここでtcp_phisycal_positionを出力する
print(f"current_coordinates: {self._robot_status.tcp_phisycal_position}")
time.sleep(0.05)
return True4. 外部制御開始用関数の定義
run()関数でログ出力設定とデータ受信をループするスレッド設定を行います。
import socket
import threading
import time
import struct
import msvcrt
from robot_status import RobotStatus
# リモート制御用クラス
class DucoRemoteControl:
# (中略)
# リモート制御を開始する関数
def run(self):
self._logger = logging.getLogger(self.logger_name)
sh = logging.StreamHandler()
self._logger.addHandler(sh)
formatter = logging.Formatter(
"%(asctime)s:%(lineno)d:[%(levelname)s]: %(message)s")
sh.setFormatter(formatter)
thread = threading.Thread(target=self._received_robot_status)
thread.daemon = True
thread.start()
# 何かキーを押すとステータス取得を終了
msvcrt.getch()
self._app_closing = True
time.sleep(1)5. メイン関数と実行結果
メイン関数
if __name__ == '__main__':
remote_control = DucoRemoteControl()
remote_control.run()実行結果

ロボットへ制御指令を送信してロボットを動作させる。
ポート2000にクライアントとして接続し、文字列'run(test.jspf)'を送信することでロボットコントローラーに登録されたプログラム’test.jspf’を実行します。
要求が成功した場合は、ロボットコントローラーから'run start\n'が送信され、失敗した場合は’run fali\n'が送信されます。
import socket
import logging
import time
# リモート制御用クラス
class DucoRemoteControl:
_ip_adress: str = '192.168.1.10'
_port_command: int = 2000
_logger = None
logger_name: str = __name__
def request_run(self):
self._logger = logging.getLogger(self.logger_name)
sh = logging.StreamHandler()
self._logger.addHandler(sh)
formatter = logging.Formatter(
"%(asctime)s:%(lineno)d:[%(levelname)s]: %(message)s")
sh.setFormatter(formatter)
self._logger.setLevel(10)
client = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
client.connect((self._ip_adress, self._port_command))
# プログラムを開始させる指令の文字列
msg = 'run(test.jspf)'
client.sendall(msg.encode('UTF-8'))
time.sleep(0.5)
data = client.recv(256)
self._logger.info(f"ロボットコントローラーから{data}を受信")
client.close()
if __name__ == '__main__':
remote_control = DucoRemoteControl()
remote_control.request_run()
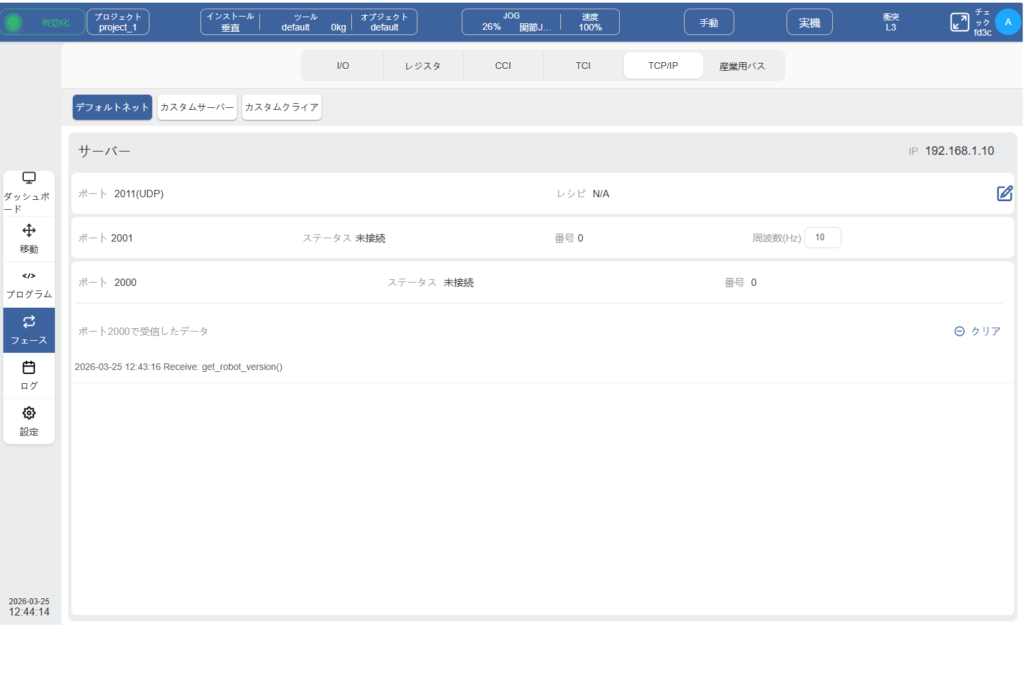
コントローラーの受信データのチェック
ティーチングペンダントでフェース→TCP/IP→デフォルトネットを選択するとポート2000で受信したデータを確認できます。