Z方向位置決め精度調査(22年8月)
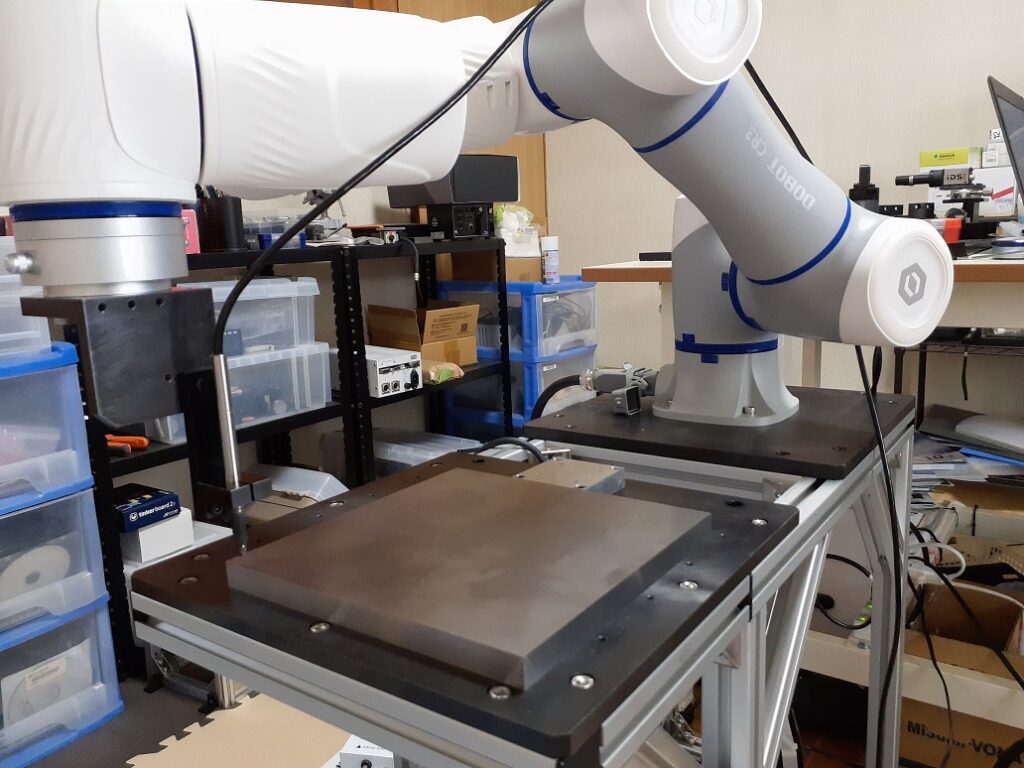
導入した協働ロボットDobot CR3Sで今後どの工程で使用可能か判断するため、位置決め精度の確認を実施。
まずは測りやすいZ方向の位置決め精度を確認した。
実施方法
- 協働ロボットのエンドエフェクタにデジタルゲージを取り付け。
- デジタルゲージ SONY DG10B(分解能1μm)
- 平面度の良好なプレートを準備
- 今回はミスミの研磨プレート NAK55SP-200-200-15(平面度 15μm/100mm以下)で代用
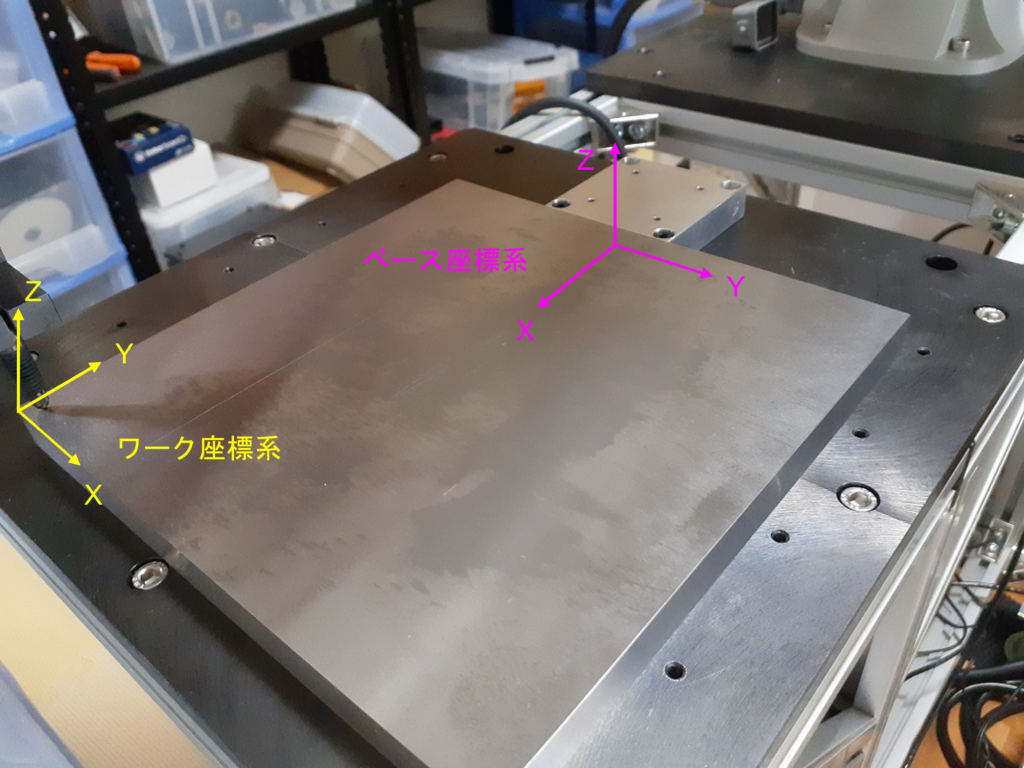
- プレートはベース座標系のXY平面にほぼ平行に設置
- 基準となる任意の点においてデジタルゲージをプレートにある程度接触するまで移動し
デジタルゲージの値をゼロセットする。 - X,Yを5mmピッチで移動し、デジタルゲージの値を記録する(X=5~190、Y=5~190:ワーク座標系)

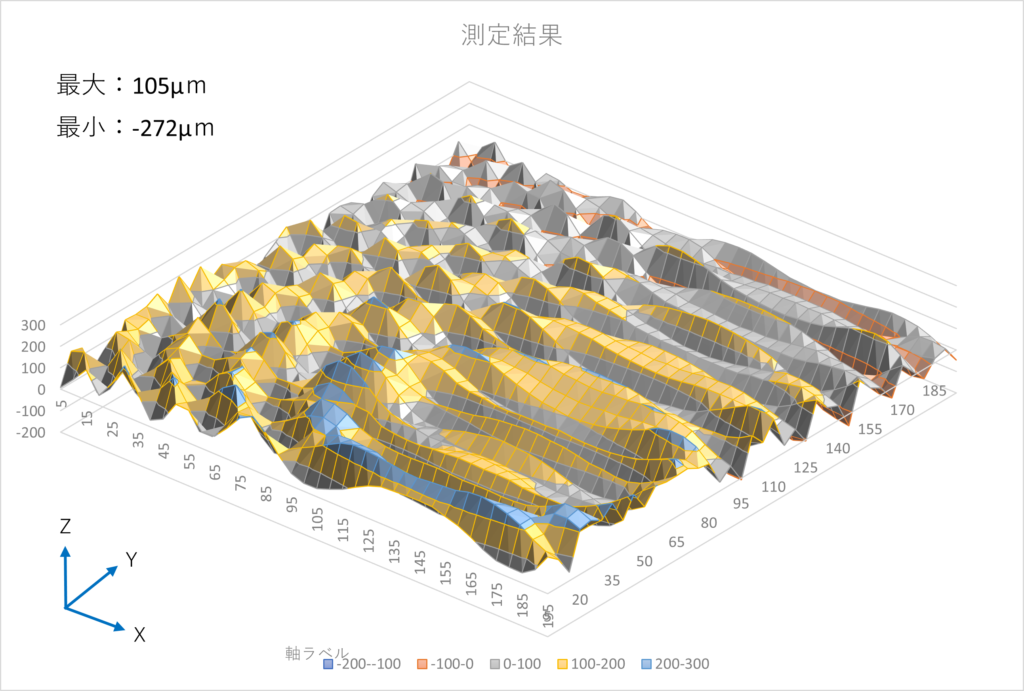
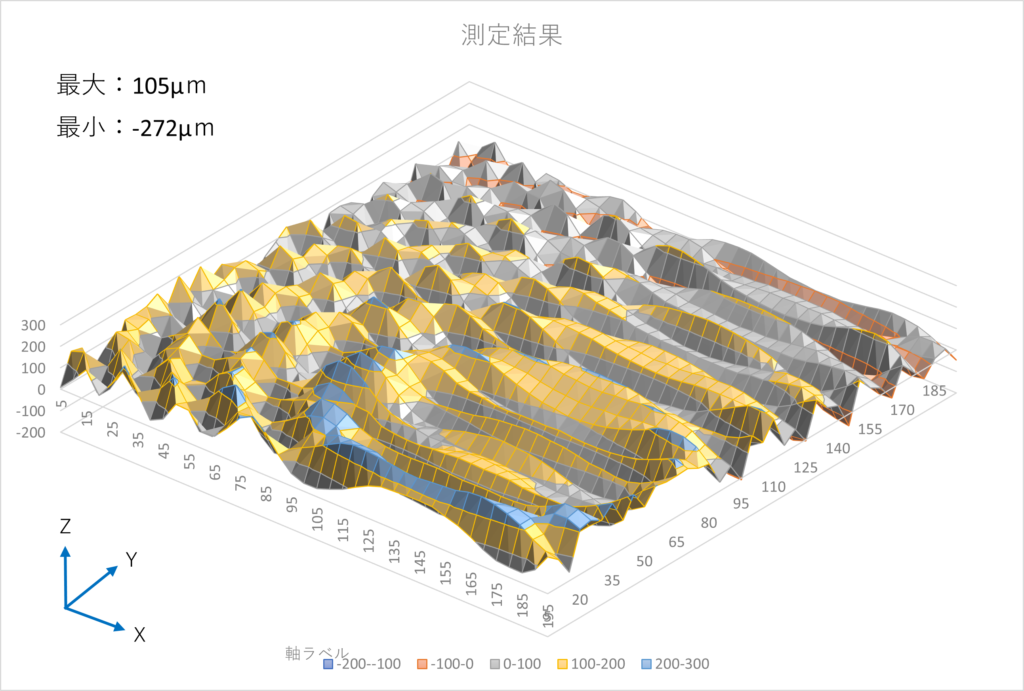
測定結果
- 最大値は105μm、最小値は-272μm
- Y軸方向に若干傾きがあるため、Z方向に関して言えば±0.15mm程度の位置決め誤差があると考えられる。
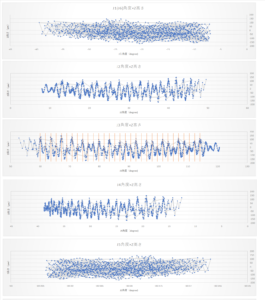
- 測定値に規則的なバラツキが見られる。
- 各ジョイント角度とZ高さで分類するとJ1とj5は相関がなさそう
- J3で見ると1.8°ピッチでピークが現れることがわかる。
追加調査1
- 【実施内容】Z軸の変位に対してのJ2、J3、J4角度の影響を確認する。
- ロボット姿勢、仕様機器とうは前評価と同じ。
- ベース座標系X方向に0.1mmで軸駆動し、その際のデジタルゲージの値を読み込む。
-① - ①の座標を基準とし、その座標において、J2軸、J3軸、J4軸をそれぞれ+0.5°駆動した際のデジタルゲージの値を読みこみ比較を行う。
- 【結果】J3軸に影響している可能性が高い。(添付ファイル参照)
追加資料2
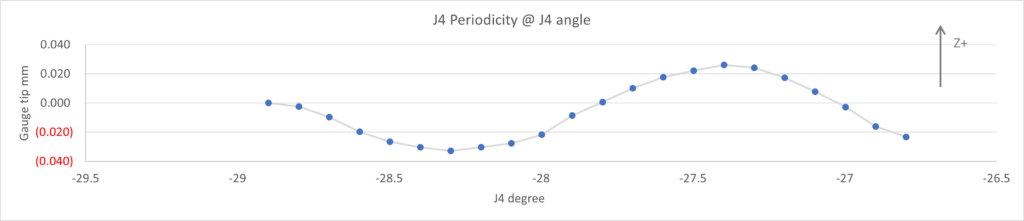
- J4軸の回転精度による誤差調査
- 1.8°周期でZ方向での振れが見られる。
- 角度の遅れ、進みが発生?
- 1.8°周期でZ方向での振れが見られる。
- J2軸の回転精度による誤差調査
- 1.8°周期でZ方向での振れが見られる。
- J3軸の回転精度による誤差量の変化
- 1.8°周期でZ方向での振れが見られる。
追加資料3
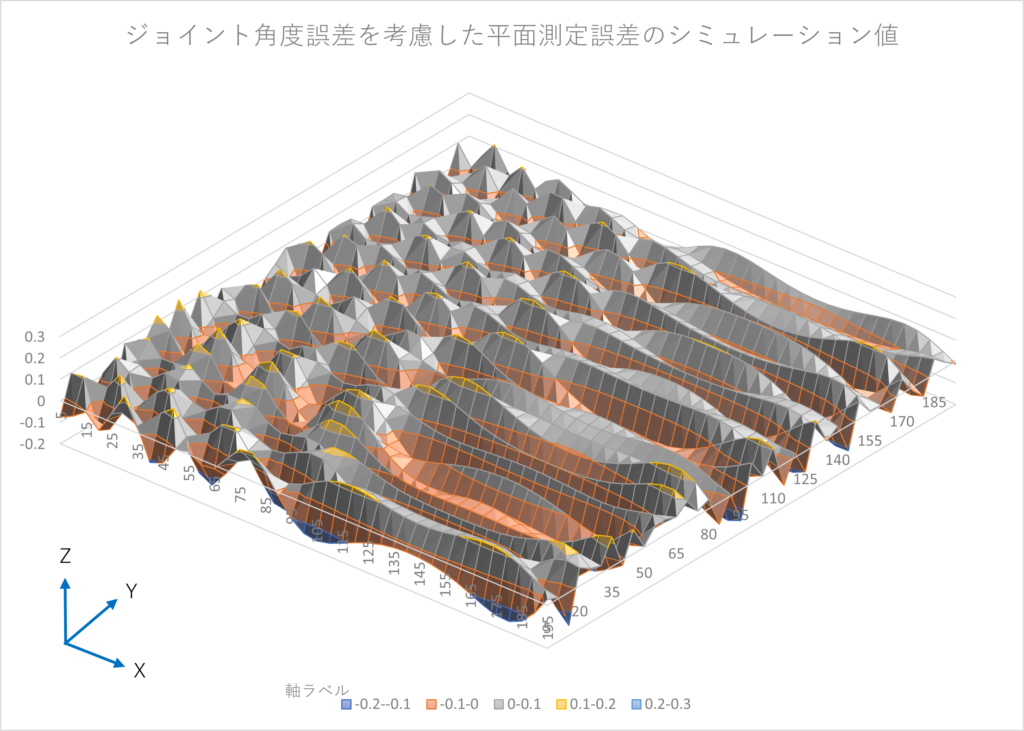
- 追加資料2のように、1.8°周期で角度に誤差が生じるとすると演算によりZ座標に生じる誤差をシミュレーションすることができ、実施結果を下に示す。
- 実測値に似た分布がシミュレーションできた。
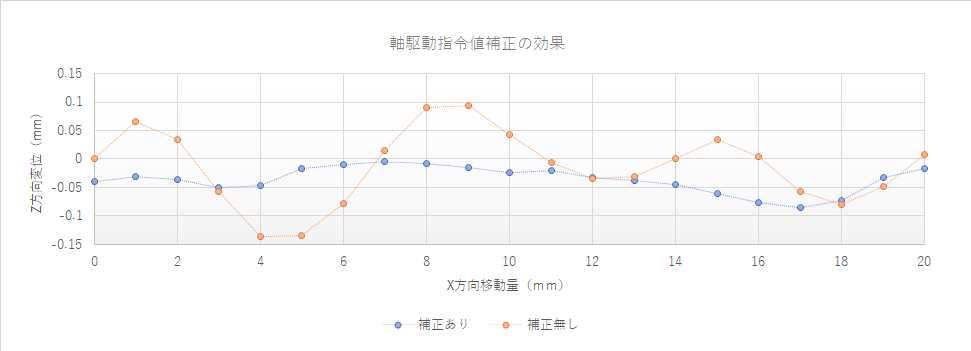
追加資料4(’22年12月26日追記)
- 追加資料2で推定した角度誤差を指令値に反映し、プレート上で長さ20mmの範囲で1mmピッチでプレートと平行に駆動させ、前述と同様にデジタルゲージでの高さ測定を行った。
- 高さ方向のバラツキは1/3~1/2程度になっている。