
協働ロボットの位置決め精度についての把握しましたので紹介します
一般的にロボットの精度については繰り返し精度については±0.01~0.02程度で仕様として記載があるものの、絶対位置精度については記載がありません。
画像検査や液体塗布など軌跡で動作する場合などは、絶対的な位置決め精度も必要となるため、現状把握の為にも調査を実施しました。
- 対象ロボット
- Dobot CR3 (3kg可搬)
- ’22年7月導入
- ’22年9月に調査実施
- Dobot CR3 (3kg可搬)
1. 調査の実施方法
- 協働ロボットのエンドエフェクタにデジタルゲージを取り付け。
- デジタルゲージ SONY DG10B(分解能1μm)
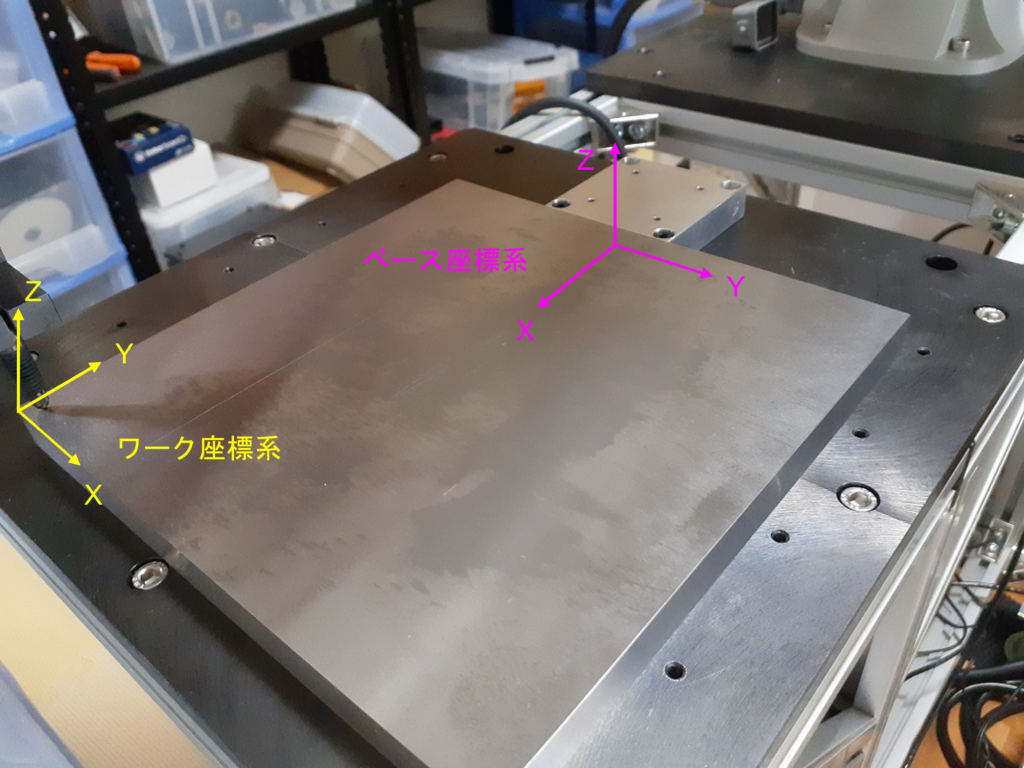
- 平面度の良好なスチールプレートを準備
- 今回はミスミの研磨プレート NAK55SP-200-200-15(平面度 15μm/100mm以下)で代用
- プレートはベース座標系のXY平面にほぼ平行に設置
- 基準となる任意の点においてデジタルゲージをプレートにある程度接触するまで移動し
デジタルゲージの値をゼロセットする。 - X,Yを5mmピッチで移動し、デジタルゲージの値を記録する(X=5~190、Y=5~190:ワーク座標系)

2. 調査結果
- 最大値は105μm、最小値は-272μm 幅 377μm
- 測定値に規則的なバラツキが見られる。(5~10mm程度の位置で凹凸あり)

3. 誤差要因の推定
各軸のジョイント角度が因子となっていそうだとは思いましたが、上記データでは明確にできなかった為、各軸の影響を切り分けるため、追加の調査として、デジタルゲージをプレートに面直に当てた状態で、J3軸を+0.1°ずつ変化させ、デジタルゲージの値を記録し、計算から得られる値との差をグラフ化したのが下記のようになりました。

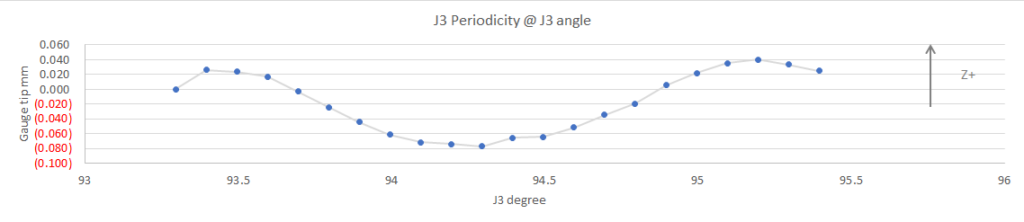
1.8°周期のサインカーブとなり、またJ2軸、J4軸でも同様の傾向となりました。
これを作図してみますと各軸のジョイント角度にて0.005~0.015°程度の遅れ進みが生じているということが分かりました。
また各ジョイント角度の誤差が把握できましたので、ジョイント角誤差から生じるTCP(のZ座標)をシミュレートしたところ(下左図)、実測値(下右図)と似た分布のデータを得ることができ、モータ一回転で生じるジョイント角度誤差がTCP位置決め誤差に与える影響が大きいことが把握できました。