
Maintenance Tool v2.1.0を使用することで簡単にバージョンアップできます。
バージョンアップ方法
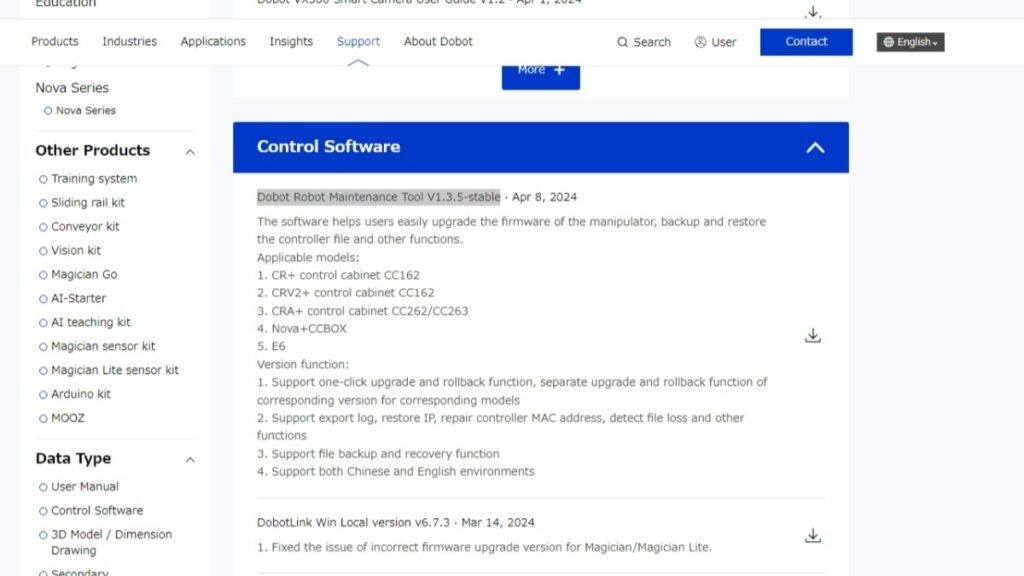
Maintenance Tool v2.1.0はDobot Download Center でダウンロードできます。
Expander “Control Software“の拡張アイコンをクリックし、”Dobot Robot Maintenance Tool V2.1.0-stable“というアイテムを探します。
またアイテムの右の方にダウンロードアイコンがありますので、クリックしてダウンロードします。ダウンロードにはログインが必要です。
ダウンロードされた”V2.1.0-stable.zip“というファイルを解凍します。
解凍したフォルダ内にある”RobotMaintenanceTools.exe“というファイルをダブルクリックしてアプリケーションを立ち上げます。
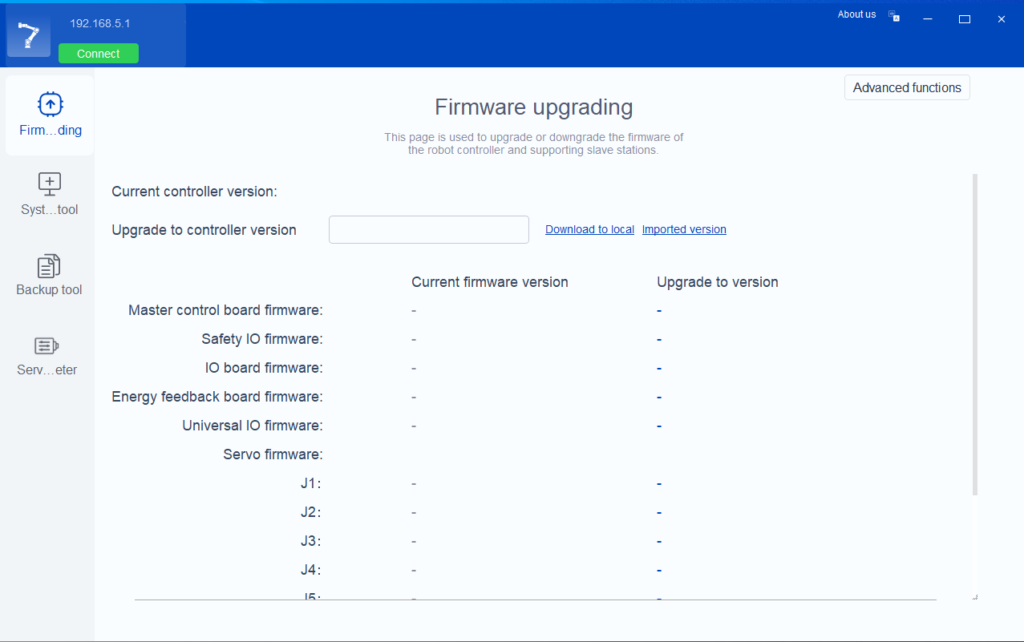
左上の”Connect”ボタンをクリックします。
接続が完了すると文字が”Disconnect”に変わります。
中央上付近にあるコンボボックスをクリックすると選択可能なバージョンのリストが展開されますので、そこにあるダウンロードアイコンをクリックしてください。

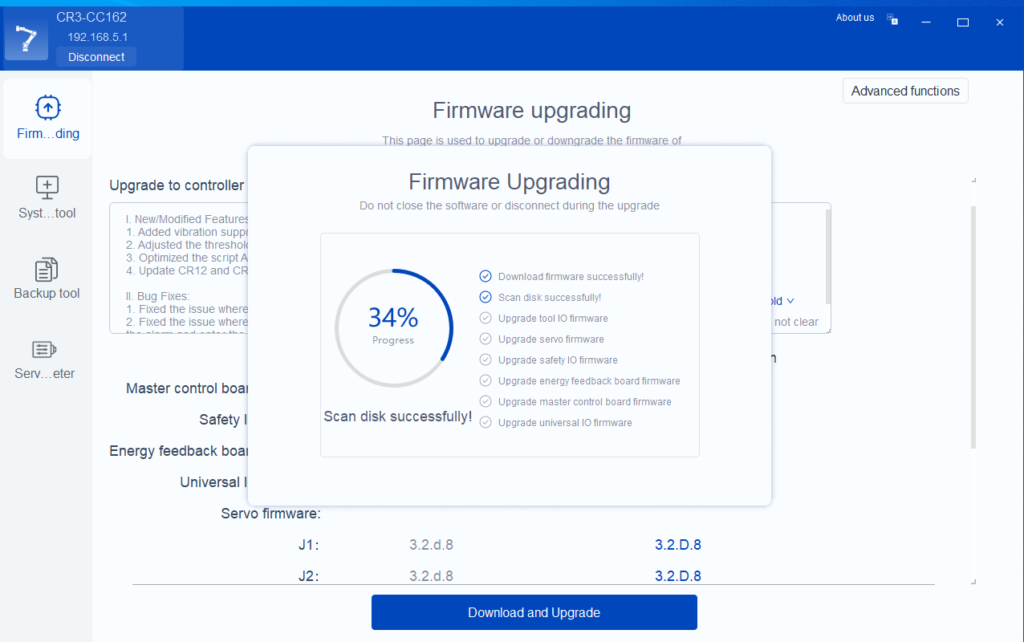
ウィンドウの下の方にあるボタン”Download and Upgrade”をクリックしてください。
インストールが進行しますので、完了までお待ちください。
完了しましたら終了になります。
バージョンアップによる変更内容(’24年12月20日時点 最新ver 3.5.8.3)
- 3.5.4
- ロボット名称”CR10V2-YD“を”CR10V2-YD“に変更
- Safe Skinの動作復帰時の定常状態エラーが検出されない問題を解消
- 座標系同期不具合の解消
- Novaが力覚センサーを使用できない問題の解消
- 軌跡再生モードで衝突を検知するとロボットが振動する問題の解消
- 再起動後に(内部)緊急停止信号が自動的にONしてしまう問題の解消
- ジョイント角のリミットをー180°以下にしたときの不具合を解消
- NovaがリモートIOモードで衝突時に一時停止をした後、アラームステータスを自動的にクリアしてしまう問題の解消
- 3.5.6
- ジッタ抑制機能を追加
- 加速度センサーのチャンネルを移動
- CR用の更新スクリプトをv3.5.6に統合
- サーボパラメーターの読み書き機能追加
- FOEをアップグレードする際にJ6軸のエラーが発生する問題の解消
- 軌跡再生による強制終了の問題の解消
- 安全信号の設定により非常停止エラーがクリアできない問題の解消
- ホストコンピュータがスクリプトを開始したときに誤ったスクリプトの状態を返す問題の解消
- 3.5.8.0
- Novaのジッタ抑制機能を追加
- Safe Skinに閾値機能追加
- スクリプトAPIにおけるToolDI/ToolAI/AI/DI制御の最適化
- CR12 および CR12V2 の軌跡再生時のデフォルトの衝突検出感度を 50% に更新
- 力制御コマンド、姿勢回転速度制限が有効にならない不具合の解消
- CCBOXにおいて非常停止を押した、コントローラーを再起動した後に、出力Modbusはアラームをクリアできず、電源オン状態になってしまう問題の解消
- 特異点付近で衝突検知後に位置偏差過大エラーが発生する問題の解消
- Safe Skinがスクリプト実行中に回復異常信号を発生する問題の解消
- 3.5.8.1
- J5軸カバーの接触感知の感度を変更
- Modbusが最大接続数を超えた時のエラーログを追加
- Safe Skinの劣化の為のプログラムを更新
- Novaのテストプログラムを更新
- アラームが発生した場合、本体の電源はオフになり、コントローラーは有効状態になる現象を解消
- ジョグ動作中の異常発生した場合の不具合を解消
- 「set user」「set tool」コマンドを使用した際の実際の座標系選択が変更されない不具合を解消
- 電源投入中の異常なサーボ電圧の発生を解消
- リモートモードの初期化が早すぎる問題を解消
- 3.5.8.3
- Goコマンドの追加
- サーボ各軸エンコーダーのアラーム機能を追加
- コントローラーとアルゴリズム間の通信が異常な場合にログに記録するプロセス名とスレッド名を追加
- 冬季の劣化対策として始動から1時間まで、2時間までとそれ以降で速度レートを30%、70%、100%と変更する処理を実装
- TCP サービス ポート 30004 ~ 6 には接続個数10個の制限があるが、11個目の接続が正常になされるがFeedbackデータが送信されない問題を解消
- 自動識別のための識別スクリプトを実行した後、インターフェイスは「読み込み中」状態のままになる問題を解消
- 3 ポジション スイッチで ドラッグ モードを終了できない問題を解消
- リモートモードに切り替えた際に、リモート操作が失敗する問題を解消
- スクリプトを終了するときにグローバル変数が正しく保存されない問題を解消
- TCP/IP 通信はリモート IO モードが有効になっている場合はデータの受信に失敗する問題を解消
- Systimeの戻り値の演算を最適化
- 開始点が最初のモーション コマンドと一致する場合、スクリプトは逆解を報告しません。
- 動的速度調整後に速度超過および許容範囲外のアラームが発生する問題を解消
- CR5V2 は起動時に「安全 IO ボードの Modbus 切断と給電ボードの Modbus 切断」をアラームする問題を解消
- 3.5.8.5
- Novaにおいてジッターを抑制するモードをデフォルトにした
- CR v2におけるサーボの新しいアラームコードを追加
- Nova2が二次開発コマンドを通じてエンドエフェクタIOのパリティチェックを修正できるようにした
- TCP接続時に負の値のソケットが返される不具合を修正
- CR3の二次開発におけるMoveJog動作中に、ロボットが一時的に反対方向に少し動いた後、正常な状態に戻るという問題を解決しました(停止インターフェースにジョグモジュールのリセットを追加)
- 非周期モーションコマンドの実行時に、一部の命令が完了せずスクリプトが異常終了する不具合を修正