
FAIRINO FRシリーズ仕様調査(IREX2023で展示されていた50万円協働ロボット)
FAIRINO FR3を代理店様借用することができたので、マニュアル等で調べた内容と実際触ってみて分かったことをまとめました。

製造販売会社
- FAIRINOブランドでのロボットをしているのは中国・蘇州にあるFair Innovation (suzhou) Robot System Co., Ltd
- 2022年には58億円の資金調達
- ロボット最大生産能力は 10,000台/年(通常3000台)
- 販売国の80%は中国国内。
日本代理店
協働ロボットのラインナップ
- 3kg可搬、5kg可搬、10kg可搬、16kg可搬、20kg可搬、30kg可搬
販売価格(2026年4月時点)
- ミスミでの販売価格はFR3が72万円、FR10が128万円。
協働ロボットとしての安全認証
- CE認証としてISO 10218、13849、15066を認証済み。
衝突停止機能
- 軸毎にパーセンテージでの閾値設定可能。
- 衝突検知はモータでのトルク検知採用の他メーカーと同レベル。
アプリケーションの二次開発
- C++、C#、Python、Javaで使用可能なSDKを公開されています。
FAIRINO SDK マニュアル
一般的に使用される関数もそろっています。 - ROS、ROS2にも対応
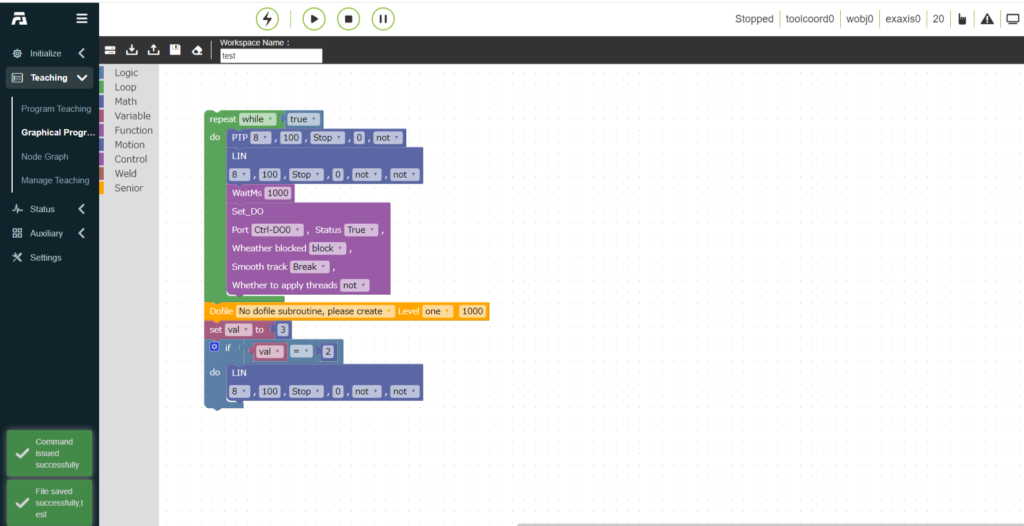
ロボット動作のプログラミングツール
- ビジュアルツールとしてはBlocklyとグラフノードが使用可
- スクリプト記述はLua言語で記述可能。変数の使用はスクリプトがやりやすい。
Luaマニュアル

フランジ寸法
- フランジへのツール取付寸法はすべての機種でISO 9409-1-50-4-M6に準じています。
- ツールコネクタはIO出力用の8ピンコネクタとRS-485通信用の5ピンのコネクタがあります。IO出力用コネクタピン配置はURなどと同配置となっています。端フランジ
設置について
- 水平、垂直、倒立でも使用可能
- ボルト締付寸法は基本URの同可搬と合わせてあり、架台は流用可能。ただしFR10、16のノック穴のみ位置が違うので注意。ロボットアームの設置
オフラインアプリ
- ロボットと接続していない状態で、ロボット操作用のGUIを触ることができるツールが準備されています。仮想環境(VMWare)上にロボットコントローラーの機能を実装。手順はマニュアルに記載されています。
FAIRINO SimMachine - オフラインアプリのバージョンはV3.9.2
- ロボットの型式はFR5から変更することが出来ない為、プログラムの作成やサイクルタイムの検証には不向き。通信機能のチェックなどには便利。
Dobot CR3との比較
| FAIRINO FR3 | Dobot CR3 | |
|---|---|---|
| 可搬重量 | 3kg | 3kg |
| リーチ | 622mm | 620mm |
| 繰り返し精度 | ±0.02mm | ±0.02mm |
| エンコーダ分解能 | 16384(14bit) | 524288(19bit) |
| 最大TCP速度 | 1m/s | 2m/s |
| 保護レベル | IP54 | IP54 |
| IO | 入力16点 出力16点 | 入力16点 出力16点 |
| ロボット重量 | 15kg | 16.5kg |
| コントローラー重量 | 2.1kg | 12kg |
| 入力電圧 | 220V | 100V or 48V |
| 最大電力 | ? | 170W |
| ダイレクトティーチ | あり | あり |
| オフラインティーチ | あり(付帯取込不可) | あり(付帯取込不可) |
その他
- マニュアルは日本語版もあり基本的な操作は記述してありますが、一部説明の無い項目や古いバージョンの記述もみられます。
安く製造できる理由の推定
- モーターの出力が小さい。最大速度が1m/sと他社に比べて小さいため、モーター、減速機、アンプ等を小さくできる。
- アーム形状の簡略化。基本円筒状で複雑な形状にしない。
- コントローラーの簡素化。排熱効率等を犠牲?
- ティーチングペンダントはオプション。
- アプリケーションの作り込みのコスト(他社よりも甘い部分はある)