
FAIRINOロボットのパラメータ設定、プログラム登録、操作を行うアプリの機能紹介をします
FAIRINOのロボット操作アプリケーションで使用可能な機能について、どんな機能、設定を使用可能かをまとめました。
本説明のUI画像は、オフラインシミュレーションアプリから切り取っている為、実ロボットとはバージョンの違いによる差が生じています。
(シミュレーションアプリ: V3.9.2、実機最新: V3.9.5)
なお項目名については、アプリケーションの表記そのままにしてありますので日本語版では分かりにくいかもしれませんが説明文を参考にしてください。
詳しい使い方はFAIRINOのマニュアルに記載がありますので確認してください。
①初期設定(Initialize)
ロボットの基本設定、安全設定、周辺機器の設定を行います。
基本設定の項目では各種座標系の設定やペイロードなどの設定を行います。
安全設定の項目では衝突検知の動作設定や危険エリアの設定などを行います。
周辺機器の項目ではグリッパーなどの接続するデバイスの設定を行います。
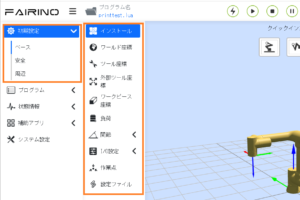
ベース(Base)
ロボットの設置、座標系やI/Oなど基本的なパラメータの設定をします。
- インストール(Mounting)
- ロボットの取り付け方向(正立、倒立、壁掛け)の設定を行います。
- ワールド座標(World TCP)
- 項目はあるが本バージョン時点では未実装で今後実装されるようです。
- ツール座標(TCP)
- 20個までツール座標系の設定が可能。座標値の数値入力のみ
- 外部ツール座標(EXT. TCP)
- ハンドツールに駆動部がある場合の拡張座標系を設定できます。
- ワークピース座標(Workpiece TCP)
- 加工や溶接などワークの原点を基準とした動作をさせたいときに使用するワークピース座標系を設定できます。
- 負荷(Payload)
- ツール取付による負荷の設定を行います。
- 関節 ソフト制限(Joint Soft limit)
- 各軸毎にソフトリミット(角度)の値を設定します。
- 関節 衝突評価(Joint Collision level)
- 各軸毎に10段階で衝突検知閾値の設定や衝突検知後の動作などを設定できます。
- 関節 摩擦補償(Joint Friction comp.)
- ドラッグモード時の軸を動かす補正力の設定で0~1で設定します。
- IO設定(IO setup)
- 各種IOの設定を行います。
- 作業原点(Home point)
- ホームポジションの設定を行います。
- 設定ファイル(Configuration file)
- ロボットのシステムパラメータ情報を格納するuser.configファイルのインポート、エクスポートができます。
安全(Safty)
安全機能に関するパラメータ設定をします。
- 安全停止モード(Safe stop)
- 衝突検知時の停止方法について設定します。
- 安全速度(Safe speed)
- 手動動作時の最大許容速度とオーバー時の挙動を設定します。
- I/O安全性(I/O saftey)
- セーフティIOの割り付け、有効設定を行います。
- 緊急停止(Emergency stop)
- 停止カテゴリと停止の為のパラメータを設定します。
- 保護停止(Protective stop)
- 保護停止時の停止カテゴリを設定します。
- 防犯壁(Safety plane)
- 動作範囲を制限するセキュリティウォールを設定します。
- 干渉ゾーン(Interference area)
- 干渉物の存在する直方体のエリアを設定します。
- 削減モード(Reduction mode)
- 減速モード時の各軸速度及びTCP速度を設定します。
- デーモン(Daemon)
- バックグラウンドで動作させたいプログラムをセットします。
- 方向制限(Direction limit)
- フランジの姿勢を制限するためのパラメータを設定します。
- ロボットの限界(Robot limit)
- ロボットの運動量と出力を制限するパラメータを設定します。
- 運動設定(Motion configuration)
- 連続する2つのパスを滑らかにつなぐブレンディングの有効化と時間最適化モードの有効化を行います。
時間最適化は、ロボットプログラム作成時の指令のパラメータの自動設定を行います。
- 連続する2つのパスを滑らかにつなぐブレンディングの有効化と時間最適化モードの有効化を行います。
- 巻き戻し(Rewind)
- 干渉領域に入ったときのステップバック動作を設定できます。
周辺(Peripheral)
主に中国製周辺機器との接続が容易になる設定が準備されています。
- グリッパー(Gripper)
- DH-Robotics、JODELLなどの中国大手グリッパーとの接続設定が容易にできます。
- 力センサー(Force sensor)
- 主に中国製力覚センサーとの接続設定をします。
- 溶接ハンドル (Welding handle)
- スプレーガン(Spray gun)
- スプレーガン使用時のI/Oの設定を割り振ります。
- 溶接工(Welder)
- 溶接機のコントローラーとの通信方法を設定します。I/O、UDP、Modbus TCPの設定が可能です。
- 拡張軸(Ext.axis)
- 付加軸の各種パラメータ及び通信方法の設定ができます。通信方法はUDPまたはRS-485です。
- 線レーザーセンサー(Line leser sensor)
- 中国メーカーのラインレーザーセンサーとの通信やキャリブレーションなどができます。
- 研磨(Polishing)
- SAIWIDER、DARUTECHの2社の研磨装置との設定が可能です。
- CNC
- 補助センサー(Auxiliary sensor)
- 組み合わせデバイス(Combination device)
- アレイ式吸盤(Array suction cups)
②プログラム(Program)
3種類のプログラミングツールとロボット姿勢を登録するテーブルを利用できます。
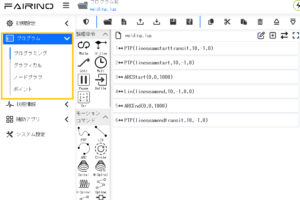
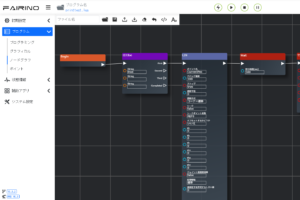
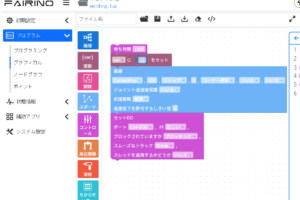
- プログラミング(Coding)
- 指令を示すアイコンをクリックすることでプログラムノードを追加し一連のプログラムを作成します。「⇄」をクリックするとLua言語で入力できるスクリプトモードへ切り替えることが出来ます。
- グラフィカル(Graphical)
- 他社の協働ロボットでも多く採用されているBlocklyライブラリを使用したプログラミングツールですが、単純な動作ではなく変数を使用したりするような動作では使用しにくいと思います。
- ノードグラフ(Node Graph)
- ロボットへの指令となるノードを矢印で接続し一連のプログラムを作成します。変数や指令のつながりはBlocklyより分かりやすいですが、指令のノードの検索などの手間がかかるのは好みが分れるかもしれません。
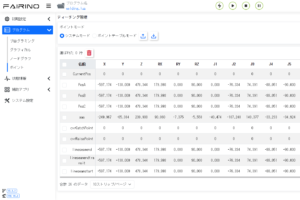
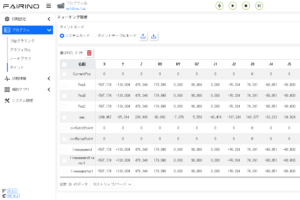
- ポイント(Points)
- ダイレクトティーチ等で登録したポイントを管理する画面となります。ポイント名はシステムとして予約されているポイント名が4つあり、CurrentPos、cvrCatchPoint、cvrRaisePoint、SeamPosはシステムで自動に座標の値が代入されています。
CurrentPosは現在ロボットのいる座標を示しますので使う機会は多いと思います。
- ダイレクトティーチ等で登録したポイントを管理する画面となります。ポイント名はシステムとして予約されているポイント名が4つあり、CurrentPos、cvrCatchPoint、cvrRaisePoint、SeamPosはシステムで自動に座標の値が代入されています。

③状態情報(Status)
イベントログ情報の管理やロボットステータスのリアルタイム取得ができます。
- システムログ(Log)
- ロボットで発生したイベントのログをレベル別、項目別に表示することが出来ます。
またログデータはファイル出力もできます。
動作プログラムからこちらのログへ出力する関数は準備されていないようです。
- ロボットで発生したイベントのログをレベル別、項目別に表示することが出来ます。
- ステータスクエリ(Query)
- ロボットのステータスを最大6つまで、30秒間の波形をリアルタイムで取得、表示できます。データは20msの間隔で取得できるためロボットの動作解析やI/Oなどの出力が正しく行われているかなども確認できます。
④補助アプリ(Auxiliary)
いろいろな工程を簡単に設定できる各種パッケージや便利ツールが使用できます。
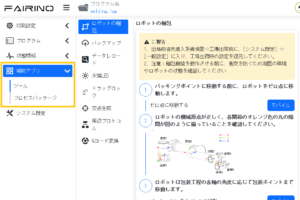
ツール(Tool app)
- ロボットの梱包(Robot packing)
- ロボットを段ボールへ収納するときのステップの説明と、登録された姿勢に動作させるためのボタンがあります。
- バックアップ(Data backup)
- データレコード(Data recording)
- 最大15個のロボットステータスを10秒間のデータをCSV形式でファイル出力できます。データの取得間隔は10msecです。
- 末端LED(End LED)
- ロボットのフランジ部のLED照明の色の設定を変更します。
- ドラッグロック(Drag locking)
- ダイレクトティーチング時に姿勢をロックする設定ができます。
- 交点生成(Intersection generation)
- 3点または4点のティーチングポイントから交点を演算し、ポイントテーブルに登録することができます。
- 周辺プロトコル(Periheral protocol)
- 周辺機器との接続プロトコルを設定する画面です。
- Gコード変換(G-code conversion)
プロセスパッケージ(Process package)
- 溶接ライブラリ(Welding expert)
- 溶接条件を設定していくとプログラムを作成してくれるツールが準備されています。
- トルク(Torque)
- 剛性レベル(Stiffness level)
- パレタイジング(Palletization)
- コンベヤーの追跡(Conveyor tracking)
⑤システム設定(System)

- 一般設定(General)
- ネットワーク設定や言語設定などコントローラーの基本的な設定を行えます。
- アカウント設定(Account)
- Webアプリにサクセスする為のアカウントやパスワードを管理できます。
- について(About)
- ロボットやコントローラー、Webアプリのバージョン情報を見ることが出来ます。
- カスタマイズ(Custom info)
- 維持する(Maintenance)
- メンテナンスモードに入るためのパスワード入力画面が表示されます。メンテナンスモードの詳細は不明です。