
ロボットピッキングで活用可能な低コストな3Dカメラ Intel Realsense D435の簡単な評価を行いました。
Intel RealSense D435とは
Realsenseは、Intel社が販売している3Dカメラで、2台の赤外線カメラを使用して、視差から物体の形状を抽出します。
D435は赤外線カメラの他に、RGBカメラ、IR投射器を内蔵しており、同様な構成のD415に対し広視野となっています。
Intel RealSense SDK 2.0を活用し、独自の画像処理アプリの作成も容易です。

Depth Camera D435 – Intel® RealSense™ Depth and Tracking Cameras (intelrealsense.com)
1.RealSenseで取得可能なデータ
RGB画像および左右カメラのIR画像を取得できます。サイズは最大1280pix×800pixになります。
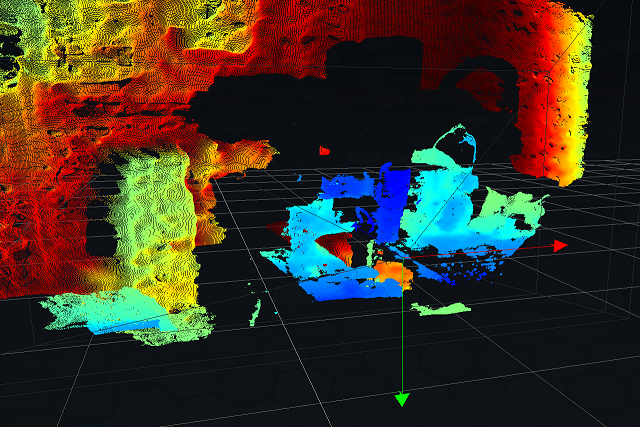
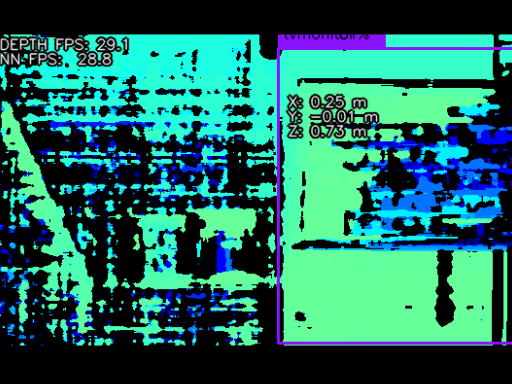
またIR画像から演算された深度情報(IR画像サイズと同じ)と、点群のデータを取得できます。


2.深度情報の取得
深度情報を精度よく取得するためには、IR投射器を有効にする必要があります。ハレーションや輝度不足とならないように、露光時間やゲインは調整してください。
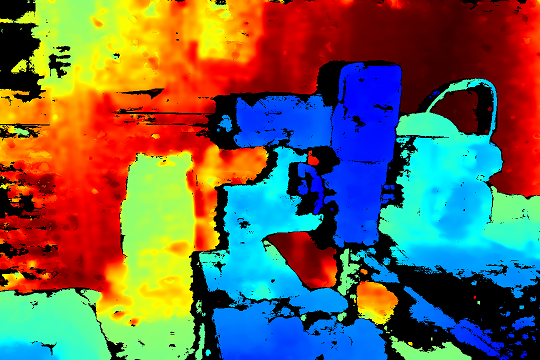
IR投射無しの場合

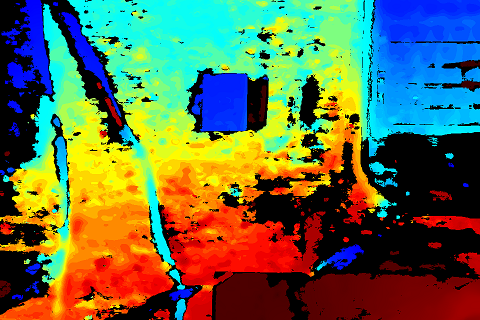
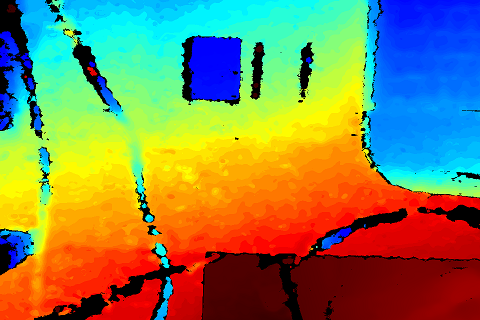
IR投射有の場合

注意としては部品が小さい場合や距離が遠い場合は、投射ドットが映らない為精度良く測ることができないため、IR投射の有効性はありません。
3.他カメラとの比較(Luxonis OAK-D-Lite)
同様の測定を弊社所有の3DカメラLuxonis OAK-D-Liteにて実施しました。

深度データの精度、欠落具合はRealSenseの方が良いです。3Dカメラとして使うにはIR投射は必須の機能だと思えます。